Decentralization: Adapting to Absurdity in a Sisyphean Moden
This installation demonstrates a cooperative approach to a repetitive task by having three robotic structures learn to cohesively and consistently balance a ball.
Using machine learning, physical computing and computer vision, I explored demonstrations of how parts of a whole operate independently, similar to a swarm, to balance a ball. The installation is an abstract representation – a metaphor, inspired by decentralized systems and applied to Camus’ interpretation of The Myth of Sisyphus.
-
Deciding what non-human intelligence to take inspiration from, what to apply it to, and how to materialize it. It was important to me to highlight alternative forms of intelligence found in the natural world.
-
Pivoting away from pneumatics and soft robotics after significant prototyping, and instead recognizing the possibility of incorporating machine learning and hardware with a philosophical application.
-
Sometimes the simplicity of a tool (linear actuators and OpenCV) is also it’s limitations. In this case, they were unable to respond quickly enough to the ball’s movements, making the genetic algorithm’s learning rate too slow.
Role: Creative Technologist; Experience Designer
Tools: Code; OpenCV; Arduino; Linear Actuators; Camera; Steel
Year: 2024



In this Sisyphean model, decentralization is reflected in three key elements: resilience and adaptability; embracing complexity; and continuous struggle and renewal.

Decentralized systems are often characterized by, among other things, their resilience and adaptability in the face of change or disruption.
Similarly, Camus' philosophy encourages individuals to embrace the inherent uncertainty and ambiguity of existence, cultivating resilience by adapting to life's ebbs and flows with courage and integrity.

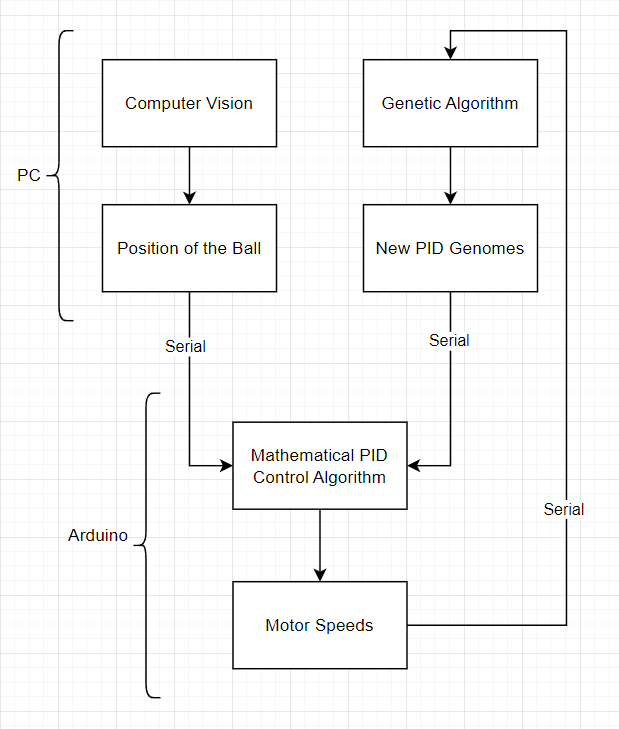
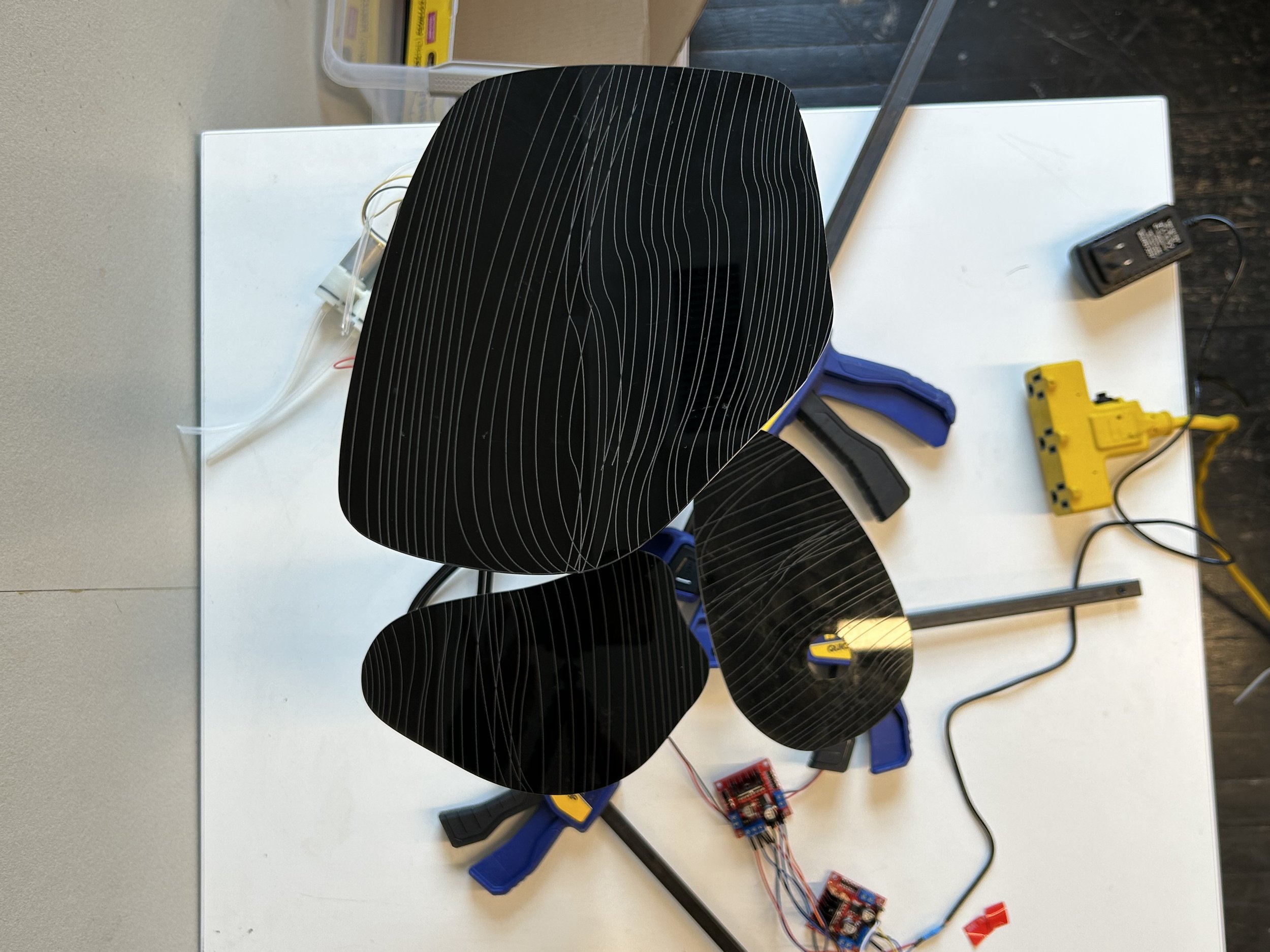
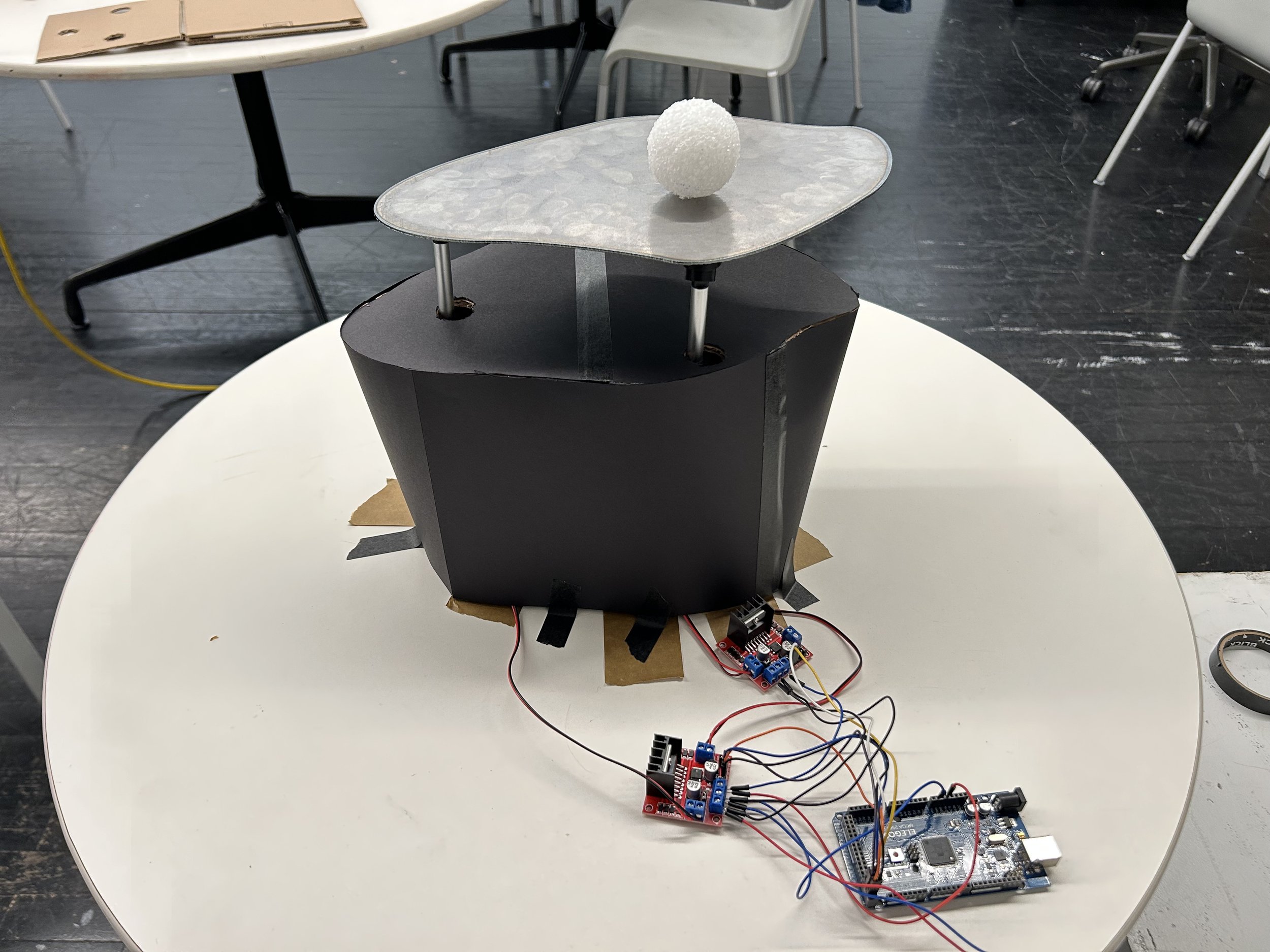
Each robot or machine consists of a steel metal plate on top of three linear actuators, which are inside of a metallic base, meaning there are nine linear actuators total across the three robots. Each linear actuator works independently to balance a moss-like ball on top of a total of three metal plates. At the start, the robots do not successfully balance the ball, meaning it will fall off the structures.
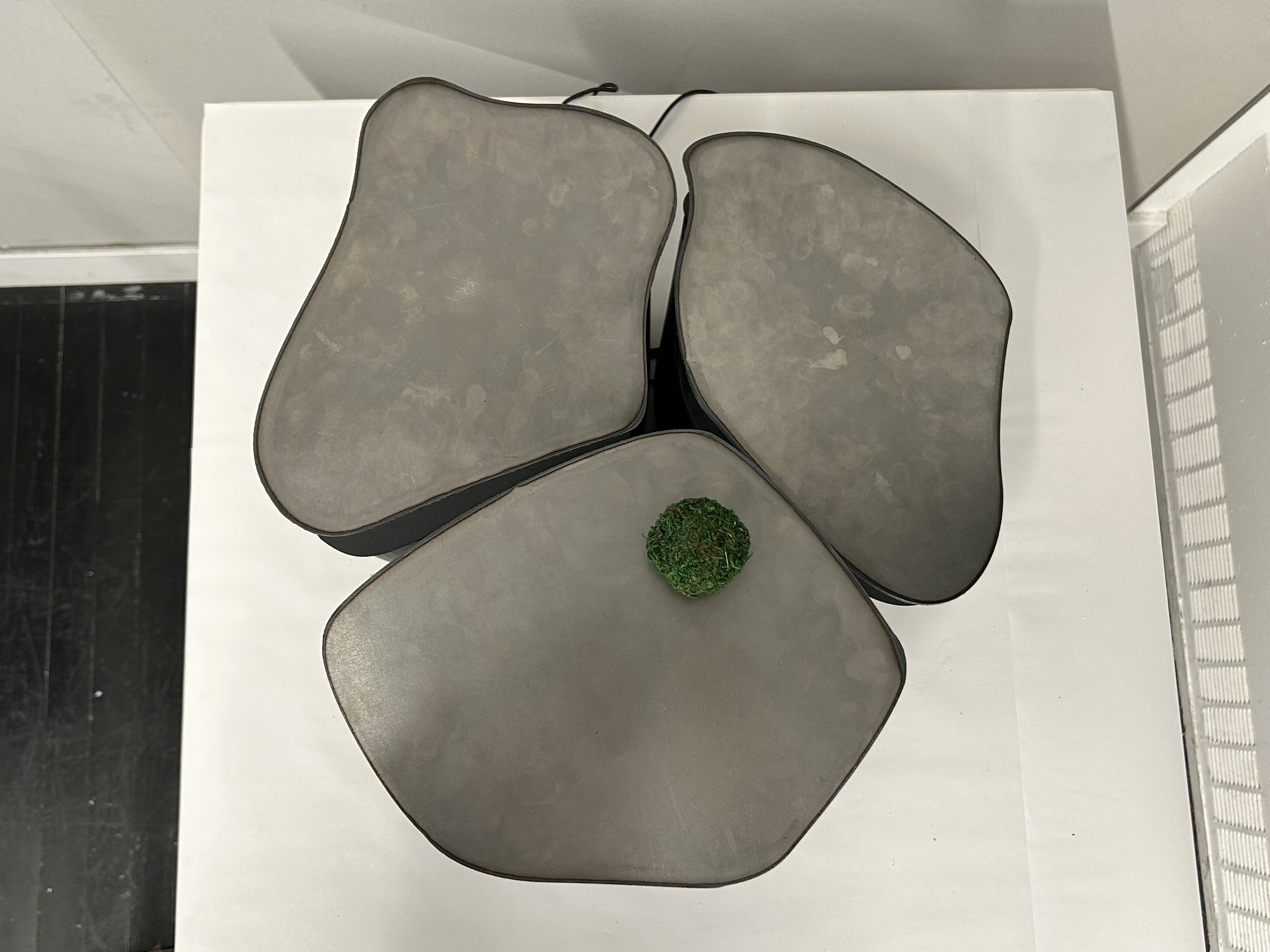
However, over time, using computer vision (openCV), Arduino code (C++), a PID controller, and a genetic algorithm, the robots learn what direction and speed to move the linear actuators in in order to balance the ball across the three plates. The code is set up such that if the ball rolls in the direction of a specific linear actuator, that actuator moves upward to push the ball in another direction instead of rolling off the edge.